Last Edit: 3/25/25
当在通过一个固定点观察物体运动的时候,使用 $R-\theta$ 坐标系描述运动吗会高效很多
Position in R-Theta System #
- 想要描述一个物体在 Coordinate 中的位置,可以通过
$$ \vec r=r\hat e_r $$
Velocity in R-Theta System #
- 将 Position 求导就可以得到 Velocity,有
$$ \vec{v} = \frac{d\vec{r}}{dt} = \frac{d(r \hat{e}_r)}{dt} = \dot{r} \hat{e}_r + r \dot{\hat{e}}_r=\dot{r} \hat{e}_r + r \dot{\hat{e}}_r= \dot{r} \hat{e}r + r \dot{\theta} \hat{e}\theta $$
- 于是就得到了两个方向上的 Velocity
ex. Finding the velocity #
A carousel is turning at the speed of 8 rpm. A child initially at 4m from the center walks toward the center at 2m/s. Find $\vec v$
$$ \vec{V} = \dot{r} \hat{e}r + r \dot{\theta} \hat{e}\theta = -2 \hat{e}r + (14)(0.84) \hat{e}\theta \quad \text{m/s} $$
Acceleration in R-Theta System #
- 再次对于 velocity 求导得到
$$ \vec{a} = \frac{d\vec{v}}{dt} = \frac{d}{dt} (\dot{r} \hat{e}r + r \dot{\theta} \hat{e}\theta) = \ddot{r} \hat{e}r + \dot{r} \dot{\hat{e}}r + \dot{r} \dot{\theta} \hat{e}\theta + r \ddot{\theta} \hat{e}\theta + r \dot{\theta} \dot{\hat{e}}_\theta = \hat{e}r (\ddot{r} - r \dot{\theta}^2) + \hat{e}\theta (\ddot{\theta} + 2 \dot{r} \dot{\theta}) $$
$$ \Rightarrow a = \hat{e}r (\ddot{r} - r \dot{\theta}^2) + \hat{e}\theta (r\ddot{\theta} + 2 \dot{r} \dot{\theta}) $$
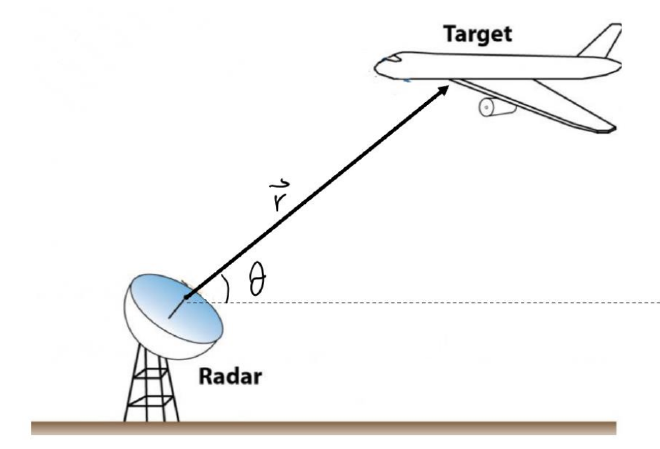
ex. Finding the Acceleration #
Extracted Problem Statement:
A shuttle is launched vertically and tracked by a radar station. At the instant when $\theta = 60^\circ$, $r = 9 km, $\ddot{r} = 21 \text{ m/s}^2$, and $\dot{\theta} = 0.02 \text{ s}^{-1}$, determine the acceleration vector $\vec{a}$

计算航天器的加速度 $\mathbf{a}$,给定数据如下:
![[DYN4.NormalandTangentialCoordinates-2.png]]
Special Case: Circular Motion #
- 对于 Polar Coordinate 中的 Circular Motion,由于 $\dot r=\ddot r=0$ 很多公式都会被化简
N-T Coordinate #
- 在 Circular Motion 中有
$$ v= ve_t $$
- 其本身就由 Tangential Direction 上的 Velocity 决定,不受影响
R-Theta Coordinate #
- 对于一个 Polar Coordinate 中的 Circular Motion,有
$$ v=\dot{r} \hat{e}r + r \dot{\theta} \hat{e}\theta $$
- 带入 $\dot r=\ddot r=0$,得到
$$ v=r \dot{\theta} \hat{e}_\theta $$
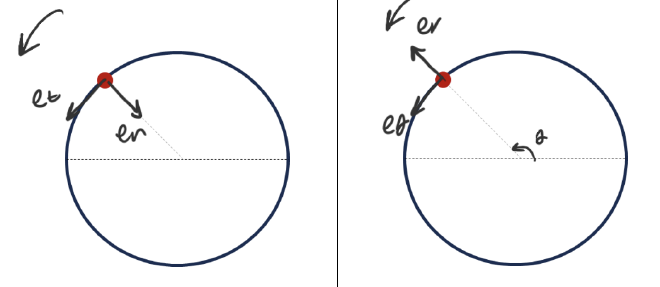
Clockwise & Counter Clockwise #
- 对于不同的运动方向,可以建立两个坐标系的关系
- 对于两个坐标系,其中一个特点就是 N-T Coordinate 中,Normal Force 是指向圆心的,而对于 R-Theta 来说,Radius 是从圆心指向物体 Postion 的,这直接导致了两个 Coordinate 下,有 $\vec a_n=-\vec a_r$
- 再者就是对于 R-Theta 中的 Angle 来说,Angle 的变化的永远以 Counter Clockwise 为正,但是 N-T 中不同转向的 Tangential Force 的正负不同,所以当 CW 时,有 $\vec a_t=-\vec a_\theta$,在 CCW 中则是 $\vec a_t=\vec a_\theta$